|
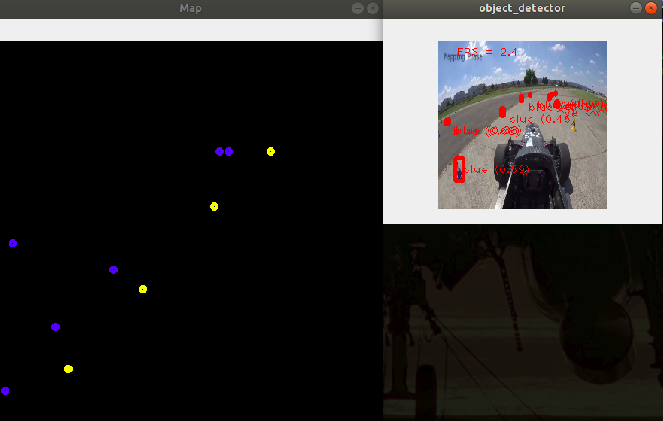
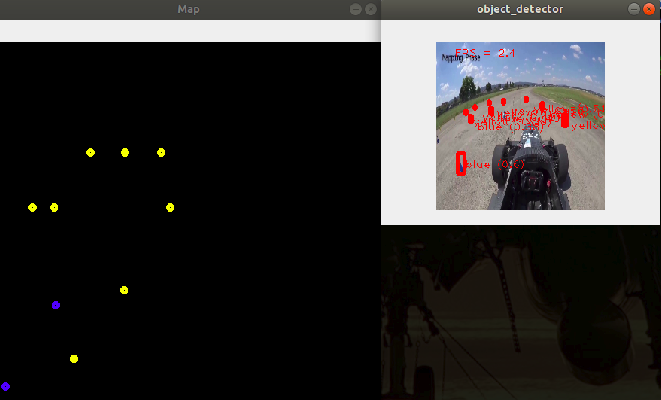
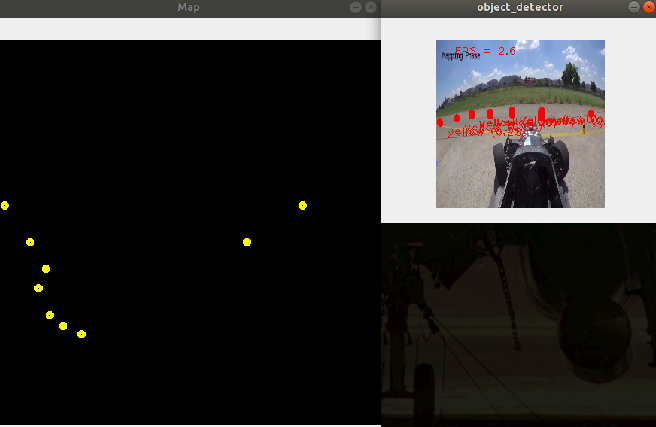
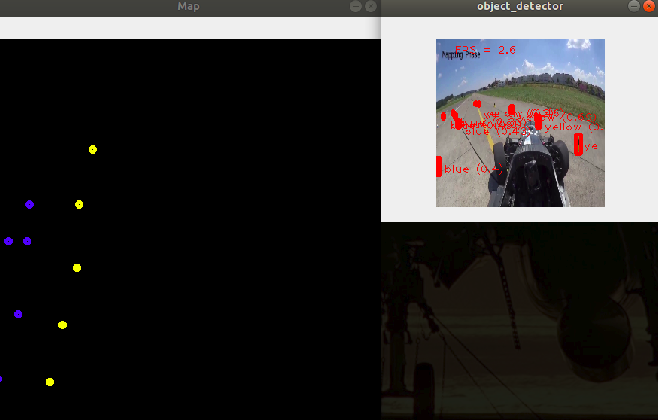
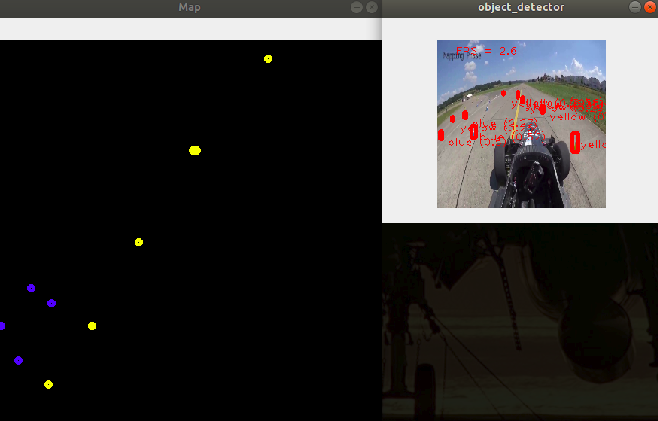
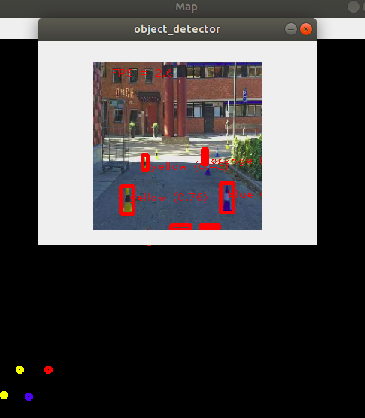
LandmarkMapper: Mapping landmarks in BEV frame |
Staying on track - Mapping landmarks of known geometry using detections from a monocular camera and visualizing them in the BEV frame



Back to Main