|
Google Summer of Code @ CROSSPath-Finding using OpenCV and Machine Learning |

Mentors
Aaron Hunter
Carlos Espinosa
Contributor:
Pranay Mathur
Introduction
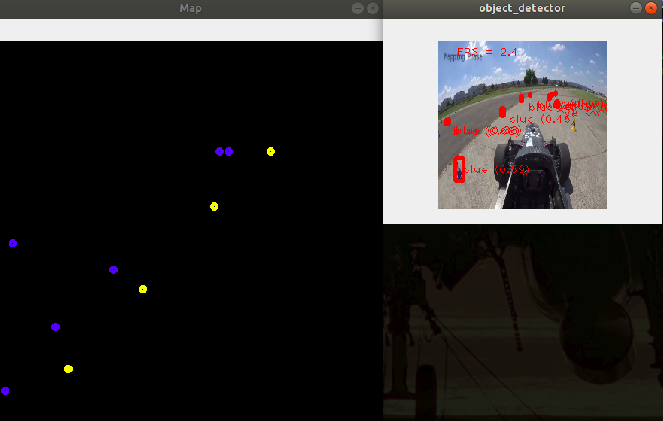
The project endeavours to build a landmark detection framework to detect course markers enabling an autonomous vehicle find an optimal trajectory to complete a circuit. This work will aid in the controller that will be used to navigate a closed course in minimal time. We use the EfficientDet family of object detectors for detection of the landmarks. The model will be deployed on a Raspberry Pi and accelerated using a Coral USB accelarator after conversion to the tflite format.
Blog
EfficientDet: Balancing Efficiency with accuracy
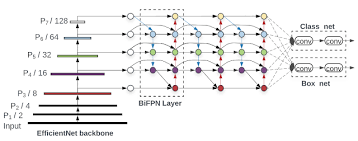
Why we chose the EfficientDet family of models and which compound scaling coefficient you should choose
Dataset and the need for augmentation
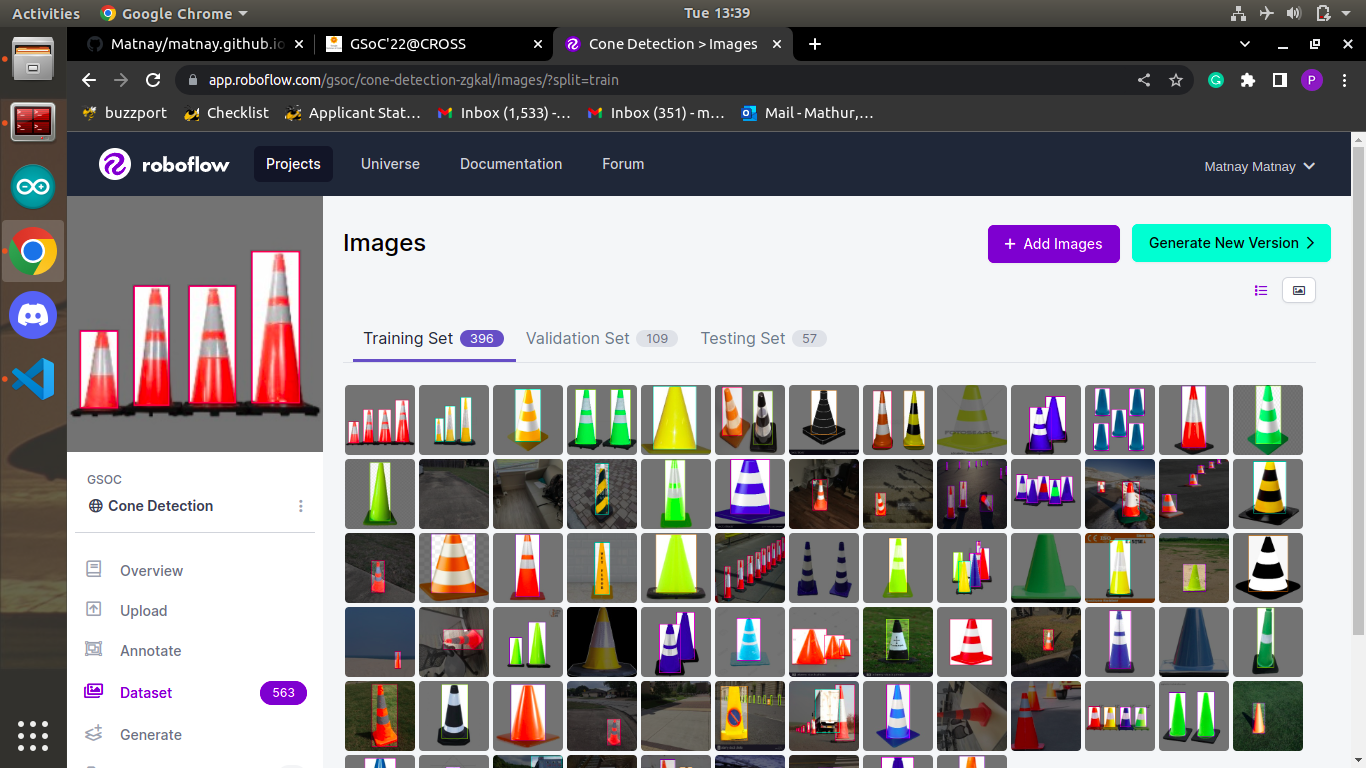
"Data! Data! Data! I can't make bricks without clay" - Sir Arthur Conan Doyle. What he and I both need and can't get enough of
Installation and setting up your Environment
Setting up your environment and installing tensorflow a.k.a the need for military precision in resolving dependency conflicts
A Jupyter Notebook for ease-of-deployment

Just press play. A jupyter notebook run in Google Colab is pure joy :) How a Jupyter Notebook will make it easier for you to test and tune your model quickly
An analysis of the tradeoff - Inference Time vs. Accuracy
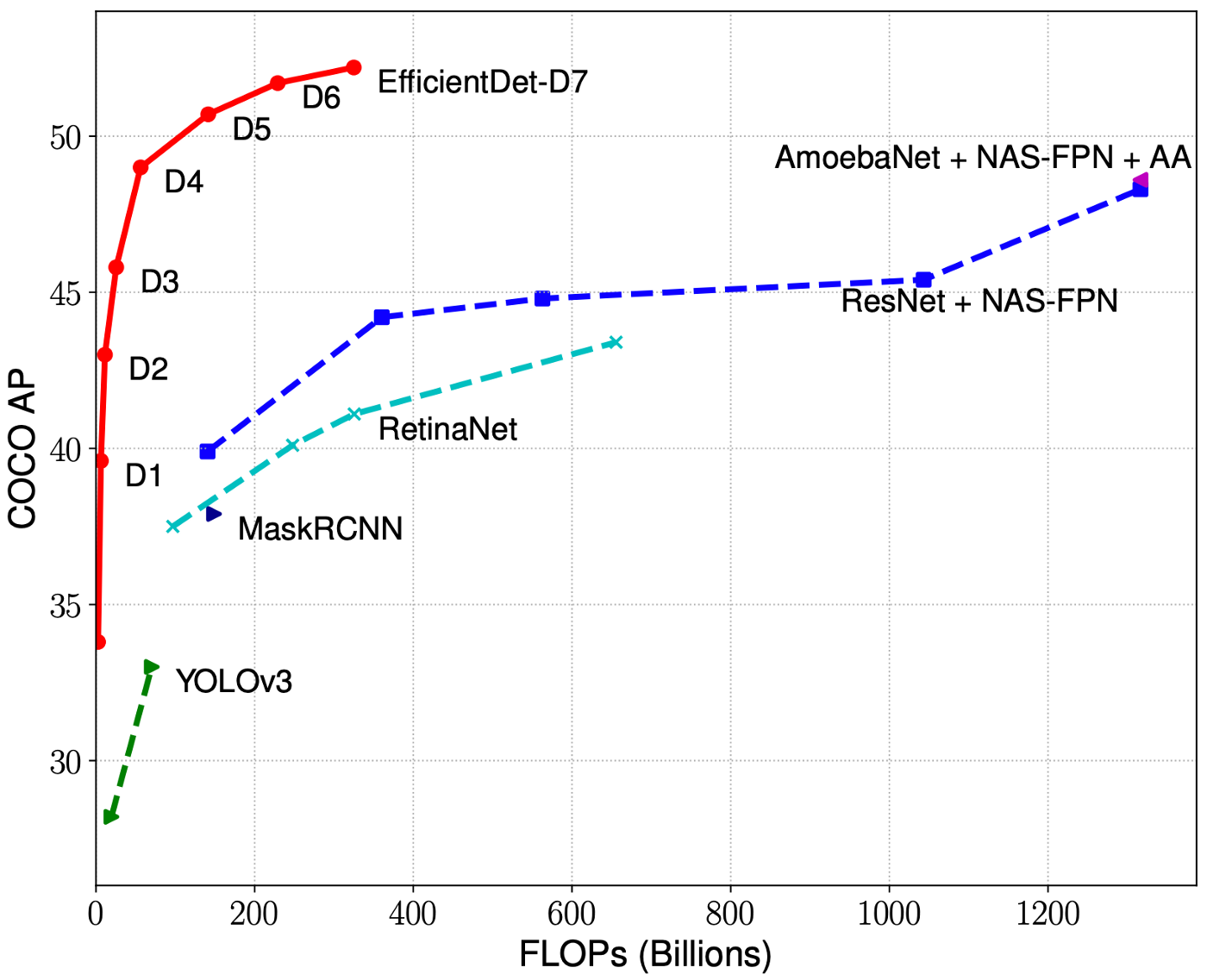
How to determine which EfficientDet model is best suited to run with limited computational resources and specified accuracy constraints
LandmarkMapper: Mapping landmarks in BEV frame